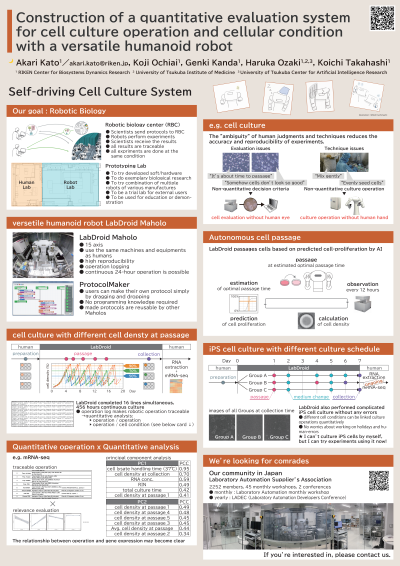
(1037-B) Construction of a quantitative evaluation system for cell culture operation and cellular condition with a versatile humanoid robot
Thursday, May 25, 2023
13:30 - 14:30 CET
Location: Hall 3
Most of the cell culture operations heavily rely on manual experimental techniques, which have problems with reproducibility and operational traceability. Efficient production of human iPS cell culture is essential for the production of tissues and organs used in regenerative medicine, but the difficulty of the operation and teaching of iPS cell-culture is posing an impediment. The use of robots is a promising option to solve this problem. Robots can perform quantitative and precise experiments with high reproducibility. In this study, we developed an autonomous culture system using the versatile humanoid robot LabDroid Maholo and software. In this system, we can quantitatively set parameters of cell culture operations, such as passage timeline, amount of liquid, suspension speed or strength, cell density as an indicator for passage, etc. We have demonstrated some different parameters for culture of a human fetal kidney cell line (HEK293A) and human iPS cells. Our system performed culture operations under the software that decides the operation schedule without any serious system errors or contamination during the experimental period. Through microscopic image analysis and molecular biological validation based on transcriptome analysis by mRNA-seq of each cell, we obtained several different operations to produce different cell characteristics. We found not only the effect of the artificially assigned parameters, but also newly discovered other parameters, strongly affect the cell states. These results have made it possible to quantitatively identify which operation or parameter in each operation of cell culture are responsible for the cellular state.